 Two incidents gave rise to this Bug Hunting episode: first, I’m currently beefing up my burglar alarm system with a Raspberry Pi and second, I’ve just come across the old song from the ’60s “Rubber Ball” by Bobby Vee while randomly surfing YouTube (“Bouncy, bouncy, bouncy, bouncy”).
Two incidents gave rise to this Bug Hunting episode: first, I’m currently beefing up my burglar alarm system with a Raspberry Pi and second, I’ve just come across the old song from the ’60s “Rubber Ball” by Bobby Vee while randomly surfing YouTube (“Bouncy, bouncy, bouncy, bouncy”).
The alarm system extension I have in mind is this: I want to be able to configure temporary inhibition of motion detection via a simple push-button: if you press it once, you suppress motion detection by one hour, if you press it n times, you suppress it by n hours, respectively. If you press the button after you haven’t pressed it for five seconds, any suppression is undone. There are status LEDs that give visual feedback such that you know what you’ve configured.
Thanks to the fine RPi.GPIO library, accessing GPIO ports is usually a piece of Pi. However, there is a fundamental problem when reading digital signals from switches and buttons called “switch bounce”, a phenomenon that has driven many brave engineers nuts.
If you flip a switch, there never is a nice transition from zero to one (or one to zero, depending on how you flipped the switch). Instead, the signal bounces between zero and one, in a rather indeterminate fashion for many milliseconds. The bouncing characteristics depend on various factors and can even vary for the same type of switch.
The takeaway is this: with switches (and buttons, of course), expect the unexpected! You must use some sort of debouncing mechanism, implemented in either hardware or software. For some background information check out this excellent article by embedded systems luminary and die-hard veteran Jack Ganssle.
But back to my alarm system. I skimmed the RPi.GPIO documentation and was happy to read that since version 0.5.7, RPi.GPIO has support for debouncing of digital input signals, so there was no need to debounce the push-button myself. Exuberantly, I sat down and wrote this test code:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
#!/usr/bin/env python import RPi.GPIO as GPIO import time # My push-button is connected to GPIO port 17. GPIO_PORT = 17 # Use official Raspi GPIO numbering scheme (port 17 is pin 11). GPIO.setmode(GPIO.BCM) # Configure GPIO port for input, use a pull-down resistor. GPIO.setup(GPIO_PORT, GPIO.IN, pull_up_down=GPIO.PUD_DOWN) # Handler that handles rising edge events. def button_pressed(): print "Button pressed!" # Register rising edge handler, ignore further rising edges for 200 ms. GPIO.add_event_detect(GPIO_PORT, GPIO.RISING, callback=button_pressed, bouncetime=200) # Keep looping forever. while True: time.sleep(1.0) |
To avoid arbitrary, floating input voltages, I setup the port such that it is pulled down (to ground) by default. As a consequence, reading that port when the button is not pressed yields a clean zero.
I didn’t want to poll the button port, as this would burn valuable CPU cycles, so I registered an event handler with the RPi.GPIO library that would be called back once a rising edge had been detected. I added a ‘bouncetime’ parameter of 200 milliseconds, to avoid multiple calls to my ‘button_pressed’ handler, in full accordance with the RPi.GPIO documentation:
To debounce using software, add the ‘bouncetime=’ parameter to a function where you specify a callback function. Bouncetime should be specified in milliseconds. For example:
|
|
# add rising edge detection on a channel, ignoring further # edges for 200ms for switch bounce handling GPIO.add_event_detect(channel, GPIO.RISING, callback=my_callback, bouncetime=200) |
In other words, after a rising edge has been detected due to a button press, I won’t be bothered with spurious rising edges for 200 ms. (200 ms is plenty of time — no switch I’ve ever seen bounced for more than 100 ms. Yet, 200 ms is short enough to handle cases where the user presses the button in rapid succession.)
I tested my button for a minute and it worked like a charm; then, I varied my press/release scheme and suddenly some spurious “Button pressed!” messages appeared. After some head scratching, I discovered the problem — can you spot it, too? (Hint: it’s a logic error, not something related to misuse of Python or the RPi.GPIO library.)
Epilogue: Once the problem was understood, the bug was fixed easily; getting rid of this darn, “bouncy, bouncy” earworm was much harder, though.
Solution

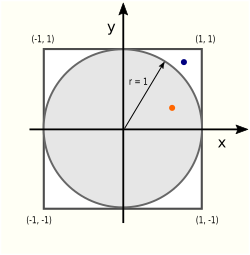 There are two areas (literally!) of interest in this picture: the circle area Ac and the square area As:
There are two areas (literally!) of interest in this picture: the circle area Ac and the square area As:{kind=link}